| Overview | Group | Tree | Graph | Index | Concepts |
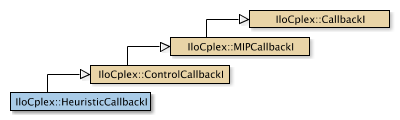
An instance of the class IloCplex::HeuristicCallbackI
represents a user-written callback in an application that uses an instance
of IloCplex to solve a mixed integer programming problem (a
MIP). When you derive a user-defined class of callbacks, this class offers
protected methods for you to:
IloCplex a potential new incumbent
solution;IloCplex about the solution status
for the current node;IloCplex about the variable bounds
at the current node;In short, this callback allows you to attempt to construct an integer
feasible solution at a node and pass it to the invoking instance of
IloCplex to use as its new incumbent. The API supports you in
finding such a solution by allowing you iteratively to change bounds of the
variables and re-solve the node relaxation. Changing the bounds in the
heuristic callback has no effect on the search beyond the termination of
the callback.
The heuristic callback is called after the node relaxation has been solved (including all cuts that may have been generated).
If an attempt is made to access information not available
at the node for
the invoking instance of IloCplex, an exception is thrown.
See Also:
IloCplex, IloCplex::Callback, IloCplex::CallbackI, IloCplex::ControlCallbackI, IloCplex::MIPCallbackI, ILOHEURISTICCALLBACK0
| Method Summary | |
|---|---|
protected IloCplex::CplexStatus | getCplexStatus() |
protected IloAlgorithm::Status | getStatus() |
protected IloBool | isDualFeasible() |
protected IloBool | isPrimalFeasible() |
protected void | setBounds(const IloIntVarArray, const IloNumArray, const IloNumArray) |
protected void | setBounds(const IloNumVarArray, const IloNumArray, const IloNumArray) |
protected void | setBounds(const IloIntVar, IloNum, IloNum) |
protected void | setBounds(const IloNumVar, IloNum, IloNum) |
protected void | setSolution(const IloIntVarArray, const IloNumArray, IloNum) |
protected void | setSolution(const IloIntVarArray, const IloNumArray) |
protected void | setSolution(const IloNumVarArray, const IloNumArray, IloNum) |
protected void | setSolution(const IloNumVarArray, const IloNumArray) |
protected IloBool | solve(IloCplex::Algorithm) |
Inherited Methods from CallbackI |
|---|
abort, duplicateCallback, getEnv, getModel, getNcols, getNQCs, getNrows, main |
| Method Detail |
|---|
This method returns the ILOG CPLEX status of the instance of
IloCplex at the current node (that is, the state of the
optimizer at the node) during the last call to HeuristicCallbackI::solve (which may have been called directly in the callback
or by IloCplex when processing the node).
The enumeration IloCplex::CplexStatus
lists the possible status values.
This method returns the status of the solution found by the
instance of IloCplex at the current node during the last call
to HeuristicCallbackI::solve (which may have been called
directly in the callback or by IloCplex when processing the
node).
The enumeration IloAlgorithm::Status lists the possible
status values.
This method returns IloTrue if the solution provided
by the last solve call is dual feasible. Note that an
IloFalse return value does not necessarily mean that the
solution is not dual feasible. It simply means that the relevant
algorithm was not able to conclude it was dual feasible when it
terminated.
This method returns IloTrue if the solution provided
by the last solve call is primal feasible. Note that an
IloFalse return value does not necessarily mean that the
solution is not primal feasible. It simply means that the relevant
algorithm was not able to conclude it was primal feasible when it
terminated.
For each variable in the array var, this method
sets its upper bound to the corresponding value in the array
ub and its lower bound to the corresponding value in the
array lb. Setting bounds has no effect beyond the scope
of the current invocation of the callback.
For each variable in the array var, this method
sets its upper bound to the corresponding value in the array
ub and its lower bound to the corresponding value in the
array lb. Setting bounds has no effect beyond the scope
of the current invocation of the callback.
This method sets the lower bound to lb and the
upper bound to ub for the variable var at the
current node.
Setting bounds has no effect beyond the scope of the current
invocation of the callback.
This method sets the lower bound to lb and the
upper bound to ub for the variable var at the
current node. Setting bounds has no effect beyond the scope of the current
invocation of the callback.
For each variable in the array vars, this method uses
the value in the corresponding element of the array vals
to define a heuristic solution to be considered as a new incumbent.
If the user heuristic was successful in finding a new candidate for an
incumbent, setSolution can be used to pass it over to
IloCplex. IloCplex then analyses the solution
and, if it is both feasible and better than the current incumbent, uses
it as the new incumbent. A solution is specified using arrays
vars and
vals, where vals[i] specifies the solution
value for vars[i].
The parameter obj is used to tell IloCplex
the objective value of the injected solution. This allows
IloCplex to skip the computation of that value, but care
must be taken not to provide an incorrect value.
For each variable in the array vars, this method uses
the value in the corresponding element of the array vals
to define a heuristic solution to be considered as a new incumbent.
If the user heuristic was successful in finding a new candidate for an
incumbent, setSolution can be used to pass it over to
IloCplex. IloCplex then analyses the solution
and, if it is both feasible and better than the current incumbent, uses
it as the new incumbent. A solution is specified using arrays
vars and
vals, where vals[i] specifies the solution
value for vars[i].
For each variable in the array vars, this method uses
the value in the corresponding element of the array vals
to define a heuristic solution to be considered as a new incumbent.
If the user heuristic was successful in finding a new candidate for an
incumbent, setSolution can be used to pass it over to
IloCplex. IloCplex then analyses the solution
and, if it is both feasible and better than the current incumbent, uses
it as the new incumbent. A solution is specified using arrays
vars and
vals, where vals[i] specifies the solution
value for vars[i].
The parameter obj is used to tell IloCplex
the objective value of the injected solution. This allows
IloCplex to skip the computation of that value, but care
must be taken not to provide an incorrect value.
For each variable in the array vars, this method uses
the value in the corresponding element of the array vals
to define a heuristic solution to be considered as a new incumbent.
If the user heuristic was successful in finding a new candidate for an
incumbent, setSolution can be used to pass it over to
IloCplex. IloCplex then analyses the solution
and, if it is both feasible and better than the current incumbent, uses
it as the new incumbent. A solution is specified using arrays
vars and
vals, where vals[i] specifies the solution
value for vars[i].
This method can be used to solve the current node relaxation, usually
after some bounds have been changed using HeuristicCallbackI::setBounds. By default it uses the dual simplex algorithm,
but this can be overwritten using the optional parameter alg.
See the enumeration IloCplex::Algorithm
for a list of the available optimizers.